Wszystkie przedsięwzięcia związane z polepszeniem czynnego bezpieczeństwa samochodu są ściśle związane z układem S—K—D. Treścią podstawowej funkcji czynnego bezpieczeństwa samochodu jest uniemożliwienie nagłych awarii zespołów konstrukcyjnych samochodu, a szczególnie tych, które mają wpływ na manewrowość, samochodu, oraz zapewnienie kierowcy możliwości pewnego i wygodnego kierowania samochodem, na który oddziałuje droga.
Inną ważną funkcją czynnego bezpieczeństwa jest przystosowanie dynamiki układu napędowego i charakterystyki hamowania do warunków drogowych i sytuacji przewozowych oraz do właściwości psychofizjologicznych kierowcy.
Możliwość wykonania manewru w czasie jazdy zależy w zasadzie od dynamiki układów napędowego i hamowania; skuteczność działania układu hamowania wpływa na długość drogi hamowania, która powinna być jak najkrótsza, a oprócz tego układ hamowania powinien umożliwiać kierowcy bardzo elastyczny wybór stopnia intensywności hamowania.
Dynamika układu napędowego wpływa w znacznym stopniu na samopoczucie kierowcy w takich sytuacjach drogowych, jak: wyprzedzanie, mijanie, przejazd przez skrzyżowania i w poprzek dróg, czyli podczas wykonywania manewrów w poziomie. W tych przypadkach natomiast gdy manewr w poziomic jest nie do wykonania na skutek zagęszczenia przeszkód, a na hamowanie jest już zbyt późno, wówczas dynamika układu napędowego ma zasadnicze znaczenie, pozwalając wyjść z awaryjnej sytuacji sposobem uprzedzenia zdarzeń.
Schemat strukturalny funkcji czynnego bezpieczeństwa samochodu pokazano na rysunku.
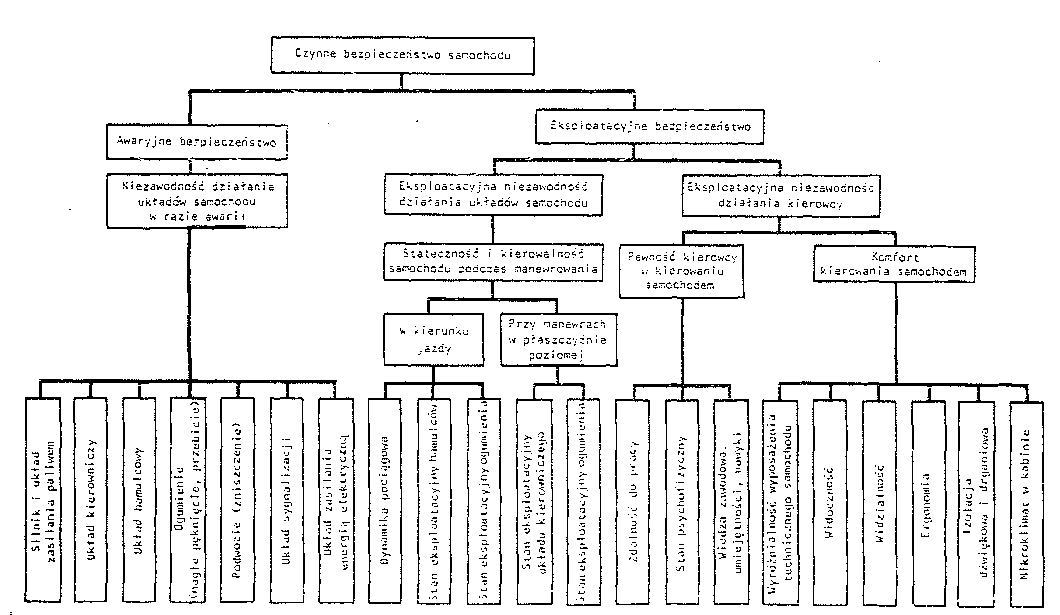 Wśród nich są dwie podstawowe funkcje: bezpieczeństwo awaryjne, określone pewnością działania zespołów samochodu w razie niespodziewanych awarii, oraz bezpieczeństwo eksploatacyjne, określone niezawodnością działania zespołów samochodu i kierowcy, czyli układu S—K.
Wśród nich są dwie podstawowe funkcje: bezpieczeństwo awaryjne, określone pewnością działania zespołów samochodu w razie niespodziewanych awarii, oraz bezpieczeństwo eksploatacyjne, określone niezawodnością działania zespołów samochodu i kierowcy, czyli układu S—K.
Realizacja funkcji czynnego bezpieczeństwa zależy od charakterystyk konstrukcyjnych samochodu. Podstawowymi swoistościami samochodu wpływającymi na jego czynne bezpieczeństwo są:
— rozwiązanie konstrukcyjne układu;
— stateczność, czyli zdolność samochodu do przeciwdziałania jego zarzucaniu i przewracaniu w różnych sytuacjach drogowych, przy dużych prędkościach jazdy;
— kierowalność, czyli zbiór tych właściwości samochodu, które umożliwiają kierowanie nim przy najmniejszym zużyciu energii fizycznej i mechanicznej podczas wykonywania manewrów w poziomie, niezbędnych do utrzymania lub zmiany kierunku ruchu;
— zwrotność, czyli ta właściwość samochodu, która wyraża się najmniejszymi promieniem zakrętu i wymiarami pojazdu;
— stateczność, określana bądź jako zdolność elementów układu S—K.—D do przeciwdziałania nieustalonemu ruchowi samochodu, bądź jako zdolność układu S—K—D do samoczynnego (lub z pomocą kierowcy) zachowywania optymalnego kierunku głównych osi samochodu podczas ruchu,
— układ hamowania, dla zapewnienia niezawodności pracy którego stosuje się: niezależne obwody przednich i tylnych kół, automatyczną regulację luzów, umożliwiającą jednakowy czas zadziałania, oraz urządzenia zapobiegające poślizgowi podczas hamowania;
— układ kierowniczy, którego zadaniem jest zapewnienie stałego sprzężenia między kołem sterowniczym a strefą styku opony z nawierzchnią drogi przy jak najmniejszym wysiłku mięśni kierowcy, i który powinien niezawodnie działać w razie niespodziewanej awarii i mieć znaczny zapas zdolności do wykonania pracy ze względu na ścieranie (zużycie) podstawowych zespołów;
— właściwe ustawienia kierowanych kół samochodu, które zapewnia zachowanie założonego kierunku jazdy w razie wystąpienia niespodziewanej krytycznej sytuacji (awarii), często komplikującej kierowanie;
— niezawodne opony, które w istotny sposób wpływają na bezpieczeństwo jazdy samochodu i umożliwiają ruch z właściwym rozkładem sil w strefie styku z nawierzchnią;
— sygnalizacja i oświetlenie.